Hi-облако, руководитель технологии лазера 3D просматривая.
 |
| Место происхождения: | Китай |
| Фирменное наименование: | Hi-Cloud |
| Сертификация: | ISO, others upon the requests |
| Номер модели: | 3D LiDAR HiSLAM |
| Количество мин заказа: | 1 |
|---|---|
| Цена: | negotiable |
| Упаковывая детали: | Случай перехода |
| Время доставки: | 20 рабочих дней |
| Условия оплаты: | T/T |
| Поставка способности: | 20 наборов/месяц |
| Применение: | Строя измерение фасада | Ряд: | 120m@20 % |
|---|---|---|---|
| Частота точки сканирования: | 300,000points/s | Точность системы: | ≤10см |
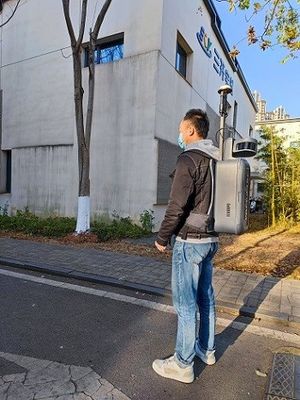
| Режим деятельности: | Handheld/рюкзак | Вес: | <2> |
| Выделить: | LiDAR HiSLAM рюкзака 3D,Handheld 3D LiDAR HiSLAM,ряд HiSLAM 120m |
||
120m выстраивают в ряд LiDAR HiSLAM ручного или рюкзака 3D в измерении фасада здания
Строя измерение фасада не только проект ядра модернизировать старые здания и построения модельной конструкции 3D в цифровой конструкции города, но также срочное требование для защиты старинных зданий и прием результатов фасада новых зданий (структур). В настоящее время, затруднения построения измерения фасада главным образом отражены в следующих 2 пунктах: во-первых, строя измерение фасада требует высокой степени уточнения детали; пункты особенности формы зданий многочисленны, сбор информации труден, и эффективность измерения низка. Во-вторых, строя задача измерения фасада большая и цикл времени короток. Традиционный метод пересечения теодолита, измерение полной станции свободное от призм, дальномер, стальное измерение правителя и другие строя методы измерения имеют серьезные недостатки недостаточной эффективности деятельности.
С развитием технологии блока развертки лазера 3D и появлением handheld блока развертки лазера 3D основанного на технологии ШЛЕМА, оно приносит новые решения для строя измерения фасада. С характеристиками компактного, портативная и мобильная сканирование, он может эффектно улучшить просматривая эффективность.
Процесс построения измерения фасада основанного на HiSLAM включает 3 основных шага: обзор поля, сбор данных поля и внутреннее преобразование данных. Высокоточные данные по облака пункта лазера 3D зданий можно получить через деятельность сбора информации поля HiSLAM, и после этого ручная в-работа составляя карту деятельность смогите быстро и эффективно получить данные по фасада.
Спецификация
| Детали | Параметры |
| Точность системы | ≤10cm (на открытом воздухе абсолютная точность) |
| ≤10cm (крытая относительная точность) | |
| Ряд измерения | 120m@20 % |
| Просматривая частота пункта |
300,000points/s |
| Панорамная камера | ≥12MP |
| Хранение данных | SSD 512GB |
| Передача данных | GigE/USB3.0 |
| Время работы от батарей | ≥4h |
| Температура деятельности |
-10-50℃, влажность < 85=""> |
| Вес | <2.5KG (handheld хозяин) |
| Режим деятельности | Handheld/рюкзак |
Преимущества
1. интеграция: сильно интегрированная, крытая и на открытом воздухе интеграция
2. тарировка свободная: тарировка независимый несущей
3. высокая точность: плотность облака высокой точки, тариф опознавания высокой точки, высокая точность измерения
4. высокая надежность: высокая степень системы productization, стабилизированных и надежных
5. высокий разум: бесшовная компоновка облака пункта панорама
Строя результаты измерения фасада с handheld блоком развертки лазера 3D основанным на технологии ШЛЕМА
![]()
Контактное лицо: Mr. EPiC Team
Телефон: +8618520517897